











- 服务热线:0755-86665401
-


- EN

三维数字图像相关DIC方法,起源于实验力学领域,用于测量位移场和应变场。随着测量方法的逐渐成熟,3D-DIC技术被广泛应用于其他领域,如材料、生物、医疗、工业检测和航天航空领域中。
丰富的应用奠定了3D-DIC方法在科学和工程领域中的重要地位,同时也对三维数字图像相关DIC方法提出了新的需求,为研究3D-DIC技术带来了挑战,特别是高精度、高计算速度和强鲁棒性等要求。
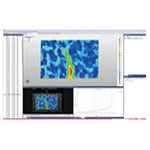
使用3D-DIC数字图像相关技术,测量物体表面的三维变形时,需要处理各个时刻两个相机拍摄到的图像,包括立体匹配、时域匹配等步骤,计算量非常大。
三维数字图像相关DIC加速和目前的计算速度,尚未能达到实时测量三维变形的要求,而且计算效率优化大多以牺牲部分测量精度为前提。基于GPU加速的三维数字图像相关法,可实现高精度、实时三维数字图像相关变形测量。
三维数字图像相关DIC变形测量,对于计算速度慢、实时性不高的问题,在不牺牲测量精度的前提下,需对3D-DIC变形测量算法进行优化;然后对三维变形测量算法进行并行化分析,并开发GPU加速的3D-DIC实时变形测量程序。
在POI(Point of Interest)数量接近10000时,程序的处理速度高达每帧34ms (约29.4 fps),满足了实时处理的需求。
3D-DIC高精度、实时测量难题
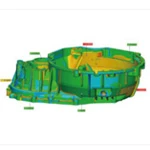
三维数字图像相关DIC方法,包括了相机标定、立体匹配、 三维重建和三维位移计算等步骤,其计算量大,实现实时的三维数字图像相关测量系统任务迫切。
3D-DIC方法中的立体匹配任务最关键。主流的2D-DIC算法是亚像素迭代式的算法,需要一个相对准确的初值来保证收敛到正确的结果,
路径依赖的初值估计方法,存在误差累积传播和难以并行等问题;路径无关的初值估计方法难以应对大变形或者存在大旋转的场景;基于特征辅助的方法虽然鲁棒性很强,但是其中的特征匹配步骤非常耗时。因此,3D-DIC中的立体匹配初值估计方法仍旧需要改善。
GPU 并行加速解决方案
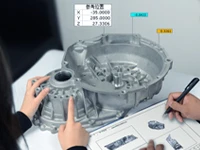
采用基于GPU并行加速的三维数字图像相关法,具有强鲁棒性的基于极线约束的3D-DIC立体匹配方法。
(1) 基于极线约束的立体匹配算法。针对鲁棒性不强的问题,采用一种新的基于极线约束的立体匹配算法,给高精度迭代算法提供多个初值。
(2)对3D-DIC匹配中的 IC-GN 2 算法进行详细的并行化分析,然后分别在CPU 和 GPU 实现了并行的 IC-GN 2 算法。
(3)基于CUDA实现GPU加速。对3D-DIC变形测量算法进行优化;然后基于CUDA 开发了GPU加速的3D-DIC实时变形测量程序。
3D-DIC 算法优化设计
1、基于极线约束的3D-DIC立体匹配算法
基于极线的立体匹配方法为每个POI 提供了多个初值,特别是在视角差异较大或两图存在相对旋转的情况下,并且不会造成误差累积和传播等问题。
2、基于图像特征的匹配初值估计方法
各种图像特征如SIFT,SURF ,ORB等为DIC匹配算法估计初值。通过将具体的特征算法从其中解耦出来,基于图像特征的匹配初值估计方法,该方法可使用任何一种或多种图像特征算法来提供关键点。
SIFT特征由于其强鲁棒性,具有尺度不变性、平移不变性和旋转不变性,对视角变换和噪声等也具有一定的稳定性。采用基于SIFT特征为POI估计初始的变形矢量,而形貌测量中使用基于极线约束的立体匹配算法。
新拓三维为您提供产品咨询,
技术咨询,点击开始聊天吧。
0755-86665401