XTDIC-CONST系列
XTDIC-MICRO系列
XTDIC-STROBE系列
XTDIC-SPARK系列
XTDIC-VG系列
XTDIC-FLC系列
XTDIC-SM系列
XTOM-MATRIX系列
XTOM-COMBINE系列
XTOM-STATION系列
XTOM-TRANSFORM系列
XTDP-C系列
Tube Qualify系列
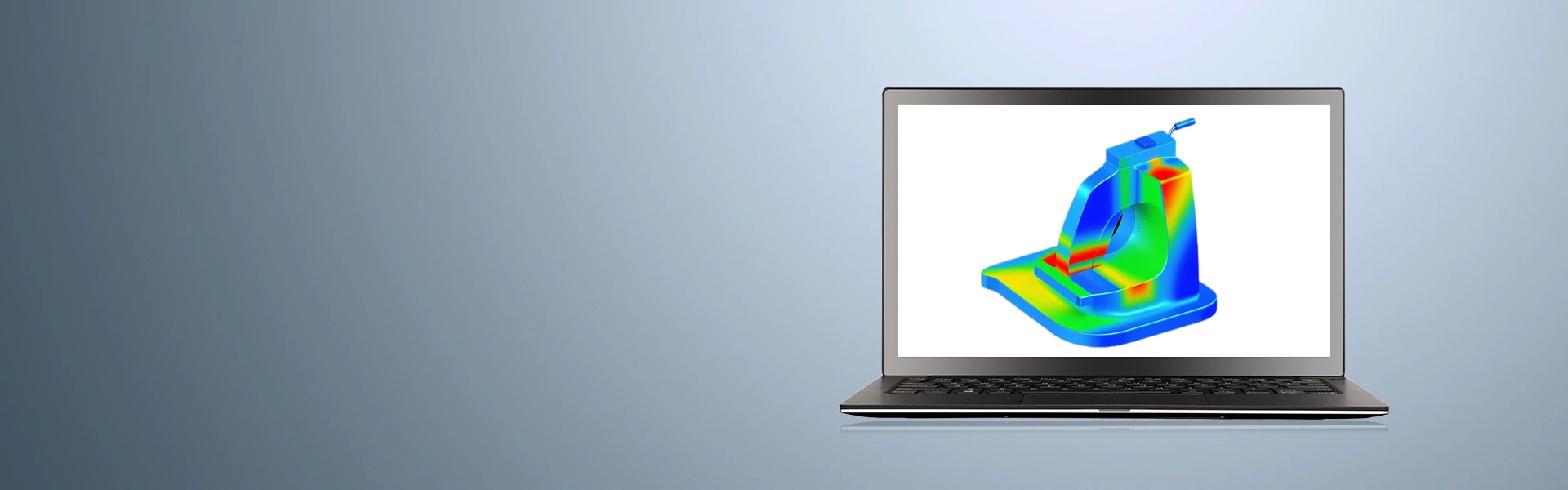
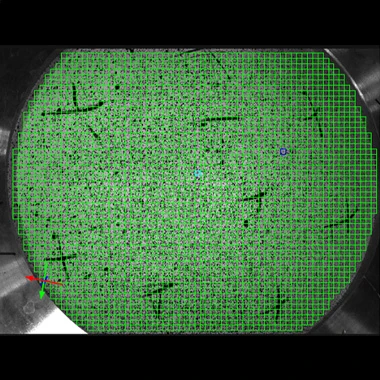
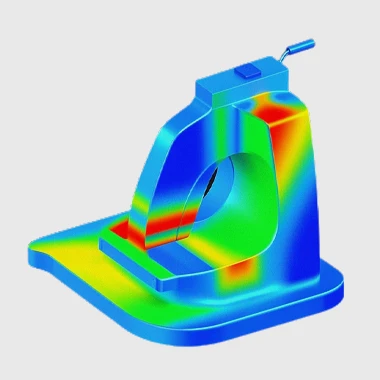
XTDIC
XTVG
XTOM
XTDP
TUBE QUALIFY
X-INSPECT
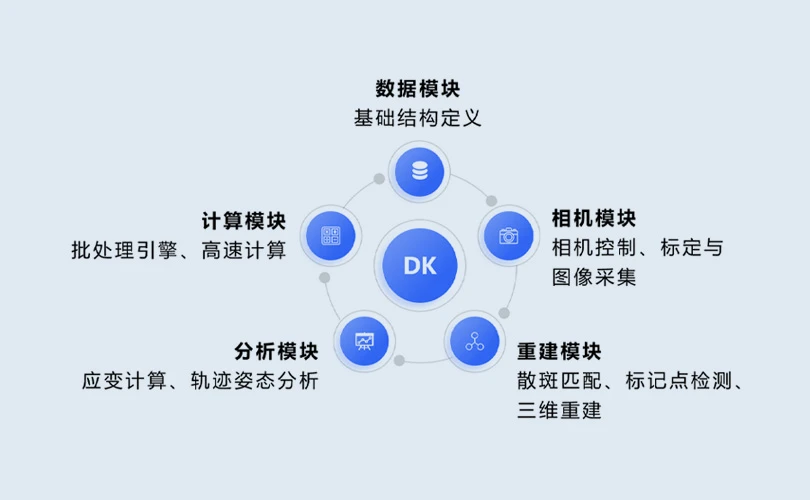
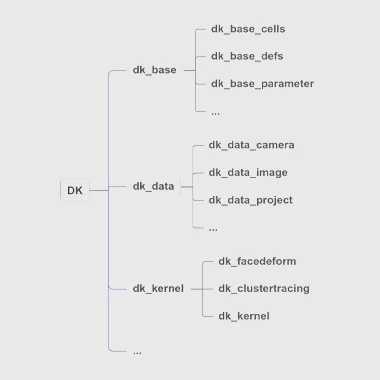
XTOP-DK系列
三维变形测量
三维工业检测
管路检测
新拓三维为您提供产品咨询, 技术咨询,点击开始聊天吧。
0755-86665401