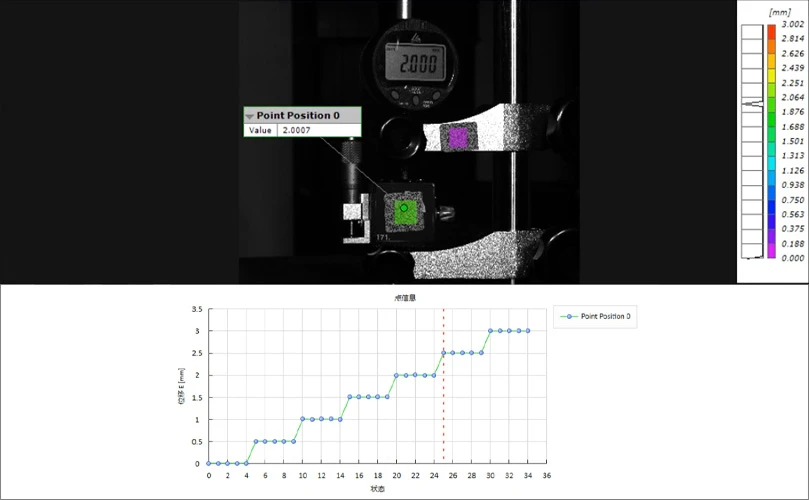
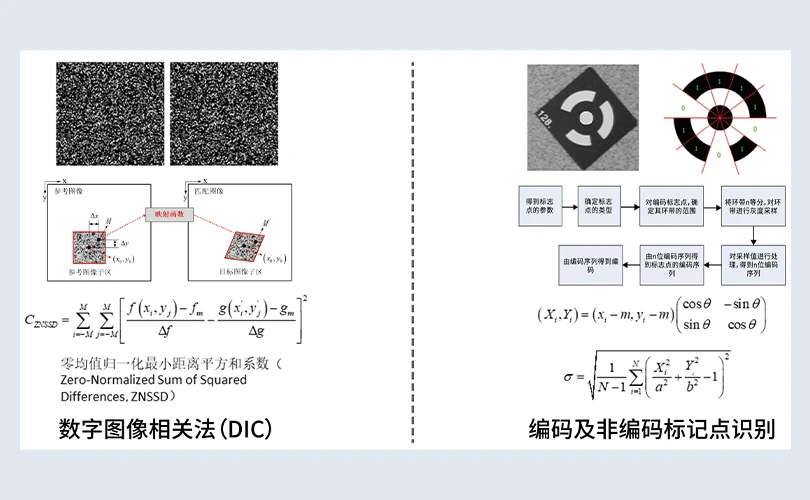
+图像识别及匹配算法
针对数字散斑及编码标记点,开发了高精度数字图像相关匹配算法、标记点中心定位及编码识别算法,实现了多种特征的精确定位及匹配。
+高精度相机柔性标定算法
基于摄影测量技术的相机柔性全局标定方法,完成几毫米到几十米范围的单相机、双相机及多相机标定,该方法不需要事先知道标定物的准确尺寸, 同时使用10参数和2F相机镜头畸变模型,可准确标定常规、超短焦、超长焦、体式显微镜等光学系统。
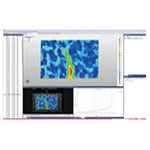
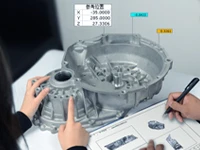
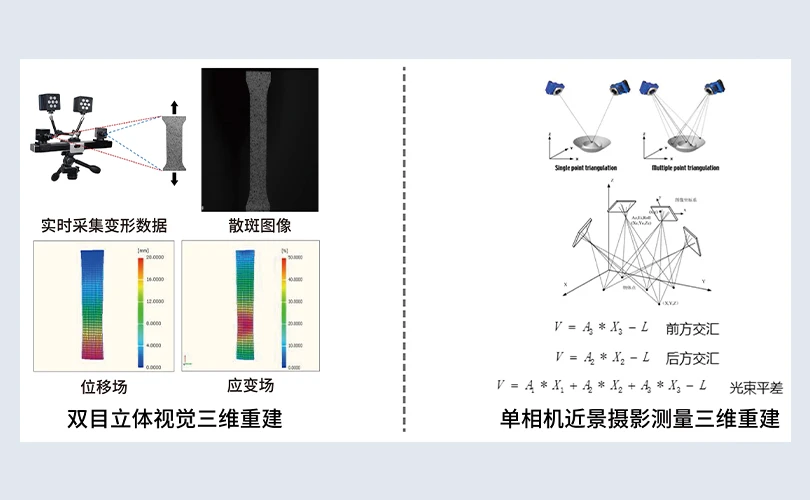
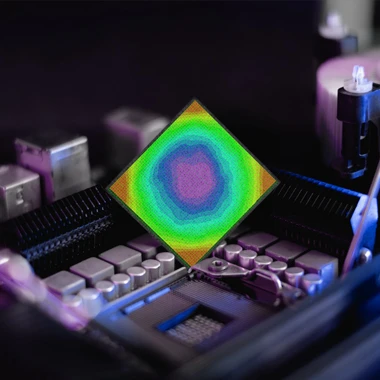
+高精度三维重建算法
开发了基于单相机多视角的摄影测量算法,可对关键点进行精确三维重建,同时,研发了基于双目立体视觉的全场密集点三维重建算法,实现全场大数据进行动态测量和快速解算。
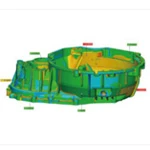
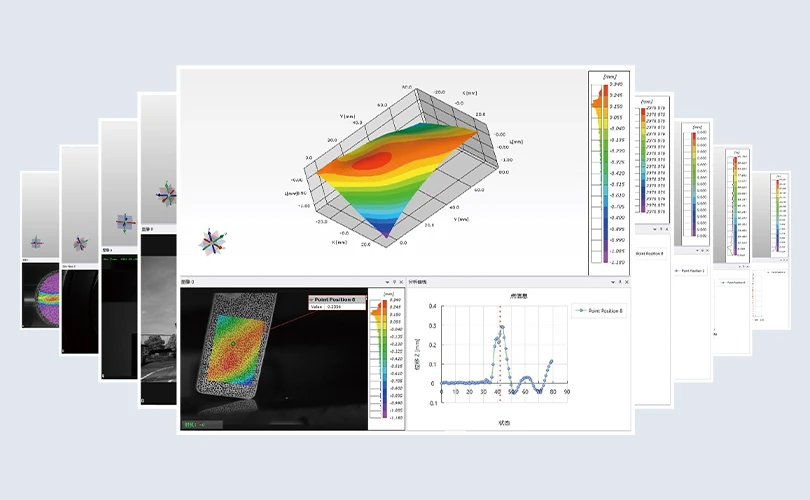
+丰富的数据后处理算法
拥有18种变形应变计算方法,插值补洞与数据平滑算法,多种几何元素创建和基于创建元素的距离及角度分析功能等,配合曲线和图标显示,使科学研究更高效、便捷。