针对大型上单翼飞机在飞行过程中机翼大挠度变形检测难题,采用DIC多相机动态测量系统,采集机翼动态散斑图像,设计大倾角散斑匹配算法和实时振动补偿标定方法,解决了图像低相关性及飞行振动干扰问题。
基于1:10缩比机翼试验台的仿真验证,采用新拓三维XTDIC-STROBE三维动态测量系统同步测量和精度对比,验证系统全场测量精度达0.21mm/2m,满足飞行载荷下机翼挠度监测要求,为航空器气动弹性分析提供了高精度全场动态变形测量方案。

一、方案背景
大型上单翼飞机在飞行过程中,机翼承受气动载荷非常大,通常翼展为40~50m的大型飞机飞行时翼尖上下波动超过1m。由于机翼变形幅度巨大,需要获得大型飞机在飞行过程中的机翼变形三维分布数据。
传统应变片法(测点密度≤20点/m²)难以捕捉全场应变分布,而摄影测量易受振动与视角限制。NASA在A380机翼测试中曾采用DIC技术,测得机翼部分区域变形,但在大倾角(>40°)工况下面临匹配失败率高的难题。
通过分布式相机布局,动态标定补偿算法和实时振动补偿标定方法,实现复杂运动下全场变形场的精确重构,对实机测量有一定的指导意义。
二、机翼动态测量难题与解决方案
难点一:大倾角变形导致图像低相关性
机翼在飞行中偏转角度可达40-50°,相机视角倾斜严重,导致散斑图像形变剧烈、灰度分布失真,传统DIC算法匹配失败率>30%,位移场出现断裂区域。
高位相机与低位相机采集的大变形弱相关图像
技术解决方案:
采用大倾角弱相关散斑匹配方法,将摄像机采集到的参考图像序列和目标图像序列作为两组图像序列,参考子集和目标子集分别在自身图像序列下进行匹配运算。这种方法能够提供可靠的初值,使线性迭代最小二乘算法更快速准确,鲁棒性更好。
多级分层匹配算法
基于特征点引导的渐进式匹配,将全局大变形分解为局部刚体运动+小变形迭代。
多相机视角融合
采用“高-低”双组相机阵列(垂尾+机身布置),覆盖±60°视场。标定时结合光束法平差优化全局位姿,4相机系统将盲区覆盖率由62%提升至98%。
大倾角弱相关散斑匹配方法
难点二:飞行振动导致测量基准漂移
实际飞行测量时,飞机受高速气流影响,安装了测量相机的尾垂部位会产生振动,要对测量相机的位置姿态进行实时动态校正。
技术解决方案:
相机动态校正
以上单翼飞机的机背为刚性不动参照,基于单像后方交会方法,实时解算基准相机在世界坐标系中的位置姿态即相机外方位元素。
通过预先标定的相对外参数,解算共轭测量相机在每一帧状态下的图像绝对外参数,实现测量相机的动态校正。
相机振动补偿
标定时先校准所有相机内方位元素,相机间相对位置关系是已知的。对于给定任意一个相机的外参数,共轭相机的绝对外参数可通过相对外参数算得。
相机振动补偿示意图
三、机翼三维全场动态变形测量
针对上单翼飞机结构特点,设计机翼三维全场变形的测量方案。
相机安装方案
测量流程与结果
经过内、外参数分别标定后,开始采集机翼变形图像,此时根据机背固定点三维坐标,实时反算相机位置,然后进行机翼全场变形信息解算。
采用新拓三维XTDIC-STROBE系统验证本次研究的测量精度,通过同步计算关键点三维坐标来比对全场解算精度。该系统在300mm×400mm幅面下测量精度可达0.01mm,测得结果可用于评估机翼全场变形测量精度。
四、试飞方案验证
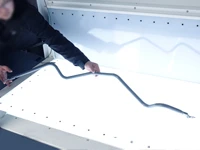
搭建仿真试验环境,采用1:10缩小飞机模型作为测量对象,对测量方案的可行性及有效性进行仿真验证。
为了评估测量精度,采用新拓三维XTDIC-STROBE系统同步追踪机翼表面的标志点,通过比对分析标志点动态三维坐标验证本方案测量精度。
机翼变形测量试验平台
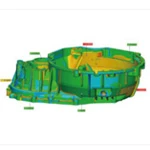
模拟测量结果
六相机测头与2个XTDIC-STROBE系统同步采集图像;最后进行全场变形解算,得到机翼的全场位移变形结果。
将测得4个关键点与XTDIC-STROBE系统测到的4个关键点的位移结果进行对比,分析差值的平均绝对值,得到机翼全场变形测量系统的精度,位移测量误差小于0.21mm/2m。
关键点测量精度
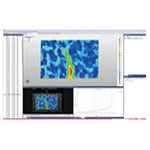
不同拍摄状态下的机翼变形三维位移场色谱云图如图所示:
机翼三维全场变形色谱云图
五、分析结论
提出了一套上单翼飞机在实际飞行过程中的机翼三维全场变形测量方案,开发了一套专用测量系统并进行了模拟测量,使用新拓三维XTDIC-STROBE三维动态变形测量系统进行了同步测量和精度对比,误差结果使用图表的形式进行分析。
1)试验机翼位移测量误差小于0.21mm/2m。
2)模拟测量结果证明,采用所述DIC测量方案是有效、可行的。
本研究为飞行过程中上单翼飞机机翼变形的 实际工程测量提供了参考价值。
案例摘自:【魏斌,梁晋,任茂栋,西安交通大学 机械工程学院 机械制造系统工程国家重点实验室,大型上单翼飞机机翼三维全场变形测量方案】