-
Product Center
-
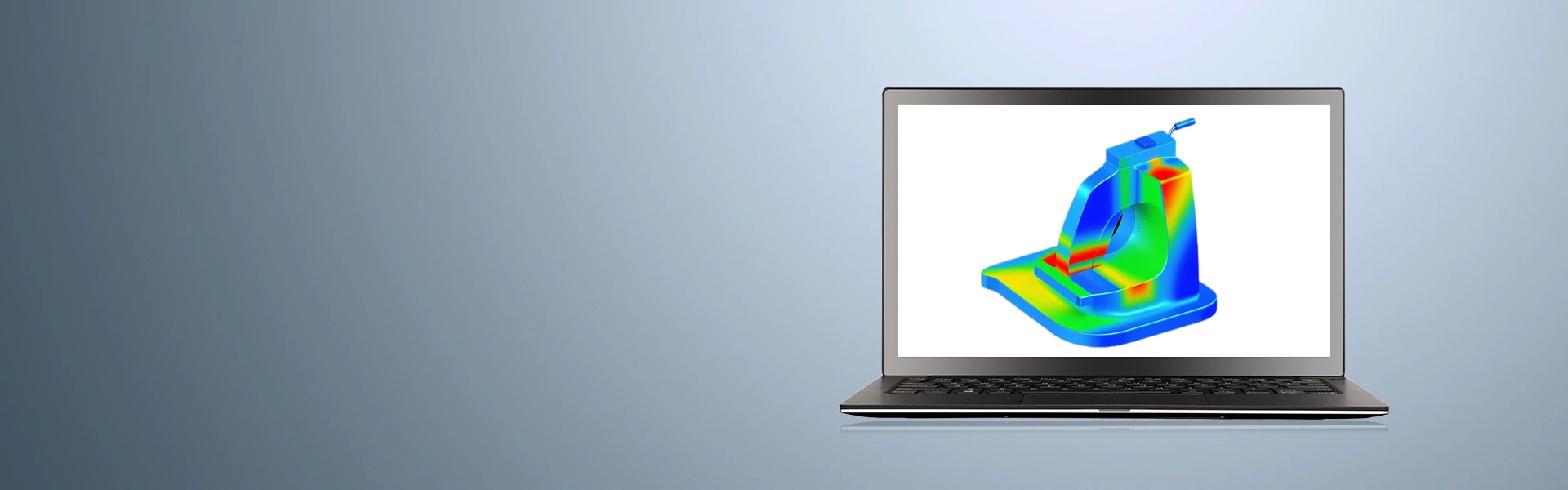
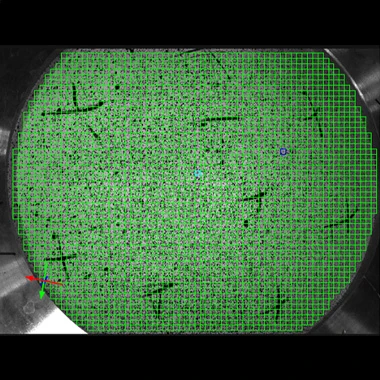
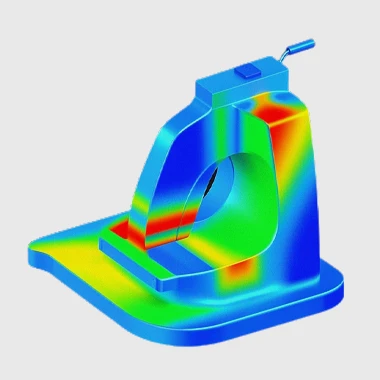
3D deformation measurement


-
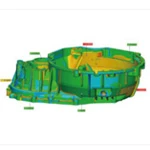
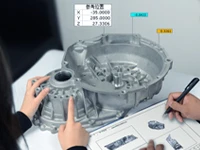
3D industrial inspection



Photogrammetry
-
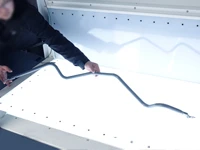
Tube inspection

Tube measurement system
-
-
Software Platform
-
Application Software
3D deformation strain measurement
-
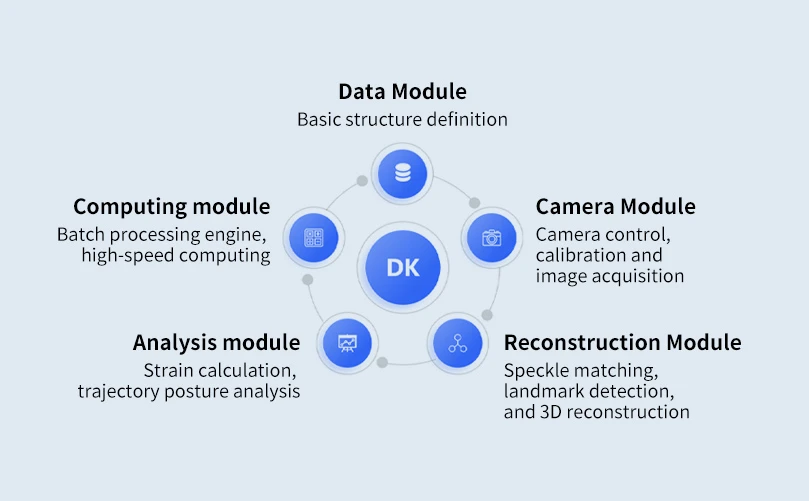
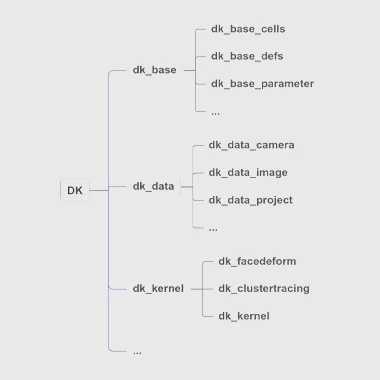
Vision Development Platform

3D Measurement SDK
-
- Solutions
-
- Cases
- Accessories
- Services
- About Us